Исследовательская группа из Лаборатории компьютерных наук и искусственного интеллекта (CSAIL) Массачусетского технологического института (MIT) разработала роботизированный захват, способными чувствовать предметы, которыми он манипулирует.
Группа под руководством профессора Эдварда Адельсона и аспирантки факультета машиностроения Сандры Лю создала сенсорные датчики для своего захвата, дающие ему чувствительность сравнимую с человеческой. Захват состоит из двух 3D-печатных пальцев, которые подобно рыбьему хвосту изгибаются в сторону приложенной силы. Обычно, подобные захваты имеют поперечные стойки, но команда CSAIL решила сделать внутреннюю часть полой, чтобы освободить место для своих сенсорных компонентов.
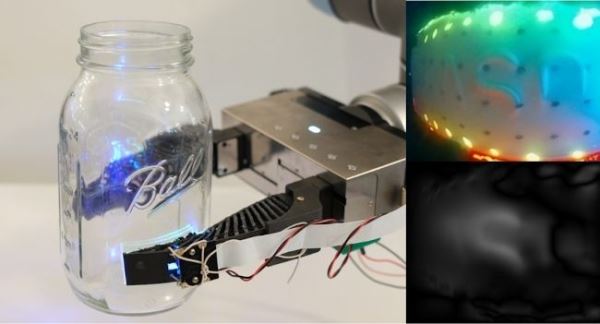
Внутренняя часть захвата освещается светодиодами. На одном конце захвата расположена камера, направленная на слой подушечек из силиконового геля под названием GelSight, которые приклеены к тонкому листу из акрилового материала.
Захват разработан таким образом, чтобы плавно обхватывать предметы. Камера определяет, как деформируются подушечки силикона и листы акрила при соприкосновении с объектом. На основе этих наблюдений камера с помощью вычислительных алгоритмов определяет общую форму объекта, степень шероховатости его поверхности, ориентацию в пространстве и необходимую силу, прилагаемую и передаваемую на каждый палец.
Используя этот метод, захват смог манипулировать различными объектами, такими как мини-отвертка, пластиковая клубника, тюбик акриловой краски, банка и винный бокал.
Сообщается, что удерживая эти предметы, захват смог обнаружить мелкие детали на их поверхности. Например, на пластиковой клубнике захват мог определить отдельные семена на ее поверхности. Кроме того, захват сжимал тюбик с краской, не выдавливая содержимое. Поднимая и опуская винный бокал, захват смог определить, когда основание бокала касалось столешницы, что приводило к удачному размещению бокала в 7 случаях из 10.
Команда надеется усовершенствовать датчик, сделав пальцы более сильными, а также создать трехпалый захват, который мог бы захватывать фрукты и овощи и оценивать их спелость. Работа была представлена на 5-й Международной конференции IEEE 2022.
, MIT
Источник: robogeek.ru
